"Занимательная анатомия роботов" - читать интересную книгу автора (Мацкевич Вадим Викторович)
Роботы первого поколения – обучаемые манипуляторы
Каждый промышленный робот – манипулятор состоит из двух основных частей: манипулятора и устройства управления. Первая отвечает за все необходимые движения, вторая – за управление ими. Описывая конструктивную компоновку робота для промышленности, трудно удержаться от сравнения его с «конструкцией» человека. Каждый промышленный робот имеет мозг – блок управления и механическую часть, включающую тело и руку. Тело робота – это, как правило, массивное основание или, как его называют, станина, а рука – многозвенный рычажный механизм – манипулятор. Чтобы рука могла совершать положенное ей многообразие движений, она имеет мышцы – привод. Задача мышц – преобразовывать сигналы блока управления в механические перемещения руки. Венчает механическую руку кисть или захватное устройство – схват.
Большинство промышленных роботов имеет одну руку, но существуют и роботы, обладающие двумя, тремя и более руками. Взглянув на руки промышленного робота, почти любой человек, даже не обладающий проницательностью Шерлока Холмса, сможет, немного подумав, определить сферу «профессиональных интересов» робота. Вот клешни из трёх крюков для круглых поковок, вот присоски, как у осьминога, для стеклянных листов, вот ковш для сыпучих материалов, и т.д. и т.п. Ещё проще разобраться в обязанностях робота, если руки его снабжены специализированным инструментом: сверлом, краскораспылителем, гайковёртом и др. Инструмент закреплён прямо на руке, а не в схвате, теперь уже ненужном.
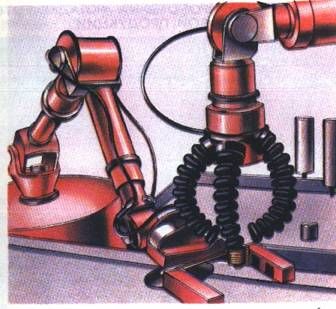 |
На выставке НТТМ-82 можно было видеть роботы, искусно манипулирующие электролампами (рис. 5). Кроме прочих весьма привлекательных достоинств один из роботов имел хитроумный захват в виде резиновых гофрированных хоботков. Когда в кисть подавали воздух, хоботки, раздуваясь, изгибались и захватывали лампу за тонкостенную стеклянную колбу с деликатной осторожностью, но прочно. Массу нежных присосок – пальцев используют для манипуляции мягкими изделиями, например шоколадными конфетами или диетическими яйцами.
Различают руки роботов и по размерам: есть экземпляры рук для работы с многотонными валами, а есть миниатюрнейшие щипчики – пинцетики для изделий микроэлектроники или часовых шестерёнок. Некоторые пальчики – усики манипулируют деталями, различимыми лишь в микроскоп.
| © 2024 Библиотека RealLib.org (support [a t] reallib.org) |