"Радиоисследования планет с космических аппаратов" - читать интересную книгу автора (Крупенио Николай Николаевич)
Радиолокационные измерения
Метод радиолокации часто используется при определении местоположения какого-нибудь объекта. При этом передающее устройство посылает радиолокационный сигнал в направлении данного объекта, и после отражения определенная часть энергии сигнала возвращается обратно на приемное устройство.
Анализируя характер отражения и рассеяния радиолокационного сигнала некоторой поверхностью, можно получить соответствующую информацию о ее физических характеристиках.
Рассмотрим несколько подробнее схему получения информации о физических характеристиках исследуемой поверхности с помощью радиолокационных измерений. Радиолокационный сигнал, попадая на границу двух сред (например, атмосферы и самой поверхности), испытывает, как мы уже говорили, отражение, рассеяние и преломление. Пусть угол падения радиосигнала на поверхность Θ постоянен (рис. 3). Если приемник с приемной антенной совершит путь по полусфере с центром в точке 0 и будет при этом записывать интенсивность принимаемого сигнала, то интенсивность последнего будет сильно меняться в зависимости от направления его приема. Полученное таким образом трехмерное распределение интенсивности принимаемого сигнала называют
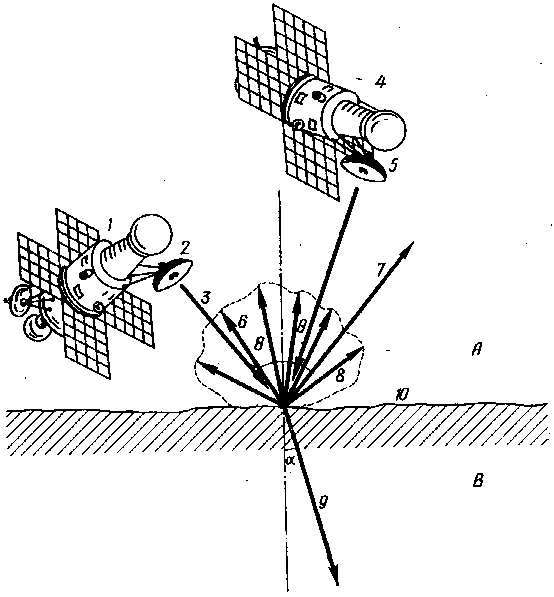 |
Рис 3. Схема радиолокационных измерений: 1 — космический аппарат с передатчиком; 2 — передающая антенна; 3 — облучающий радиосигнал; 4 — космический аппарат с приемником; 5 — приемная антенна; 6 — сигнал обратного рассеяния; 7 — отраженный сигнал; 8 — рассеянный сигнал; 9 — преломленный сигнал; 10 — граница раздела двух сред; А — менее плотная среда; В — более плотная среда; α — угол преломления; Θ — угол наблюдения (падения)
Наибольший но интенсивности радиосигнал в этом случае регистрируется в направлении зеркального отражения — под тем же углом Θ, но с другой стороны относительно нормали
Поскольку реальная поверхность состоит из совокупности плоских и не плоских площадок весьма различного размера, то ширина зоны углов, для которых наблюдается значительный по интенсивности отраженный сигнал, позволяет получить лишь некоторую собирательную статистическую величину, характеризующую определенную степень неровности поверхности. Такой величиной для крупномасштабных неоднородностей (превышающих длину волны по своим размерам) является так называемый
Мы рассмотрели угловое распределение для отраженных сигналов при фиксированном угле облучения поверхности. Если угол облучения изменяется, то соответственно будет меняться форма индикатриссы рассеяния, а отраженный поверхностью сигнал будет включать и рассеянную компоненту (см. рис. 3). В радиолокации вместо индикатриссы рассеяния используется другая характеристика принимаемого излучения —
Диаграмма обратного рассеяния также зависит от степени шероховатости исследуемой поверхности. При малых значениях углов наблюдения форма диаграммы обратного рассеяния определяется теми же неоднородностями, которые характеризуют и отраженный сигнал, т. е. размер которых составляет десятки и сотни длин волн используемого радиолокационного сигнала. Однако при больших значениях углов наблюдения форма диаграммы обратного рассеяния зависит от мелкомасштабных неоднородностей, размеры которых порядка длины волны и меньше.
Таким образом, с помощью диаграммы обратного рассеяния можно получить информацию о рельефе поверхности и степени его изрезанности в более мелких масштабах. Это особенно важно при поиске лучших мест посадки автоматических станций и лучших трасс передвижения самоходных автоматических аппаратов. Например, подобные радиолокационные измерения использовались при выборе мест посадки американских аппаратов «Викинг» на поверхности Марса, когда полученная ранее информация с помощью фотографических методов оказалась неточной.
Анализ диаграммы обратного рассеяния позволяет при малых углах наблюдения Θ оценить величину среднеквадратичного угла наклона σα — той же величины, которую дает угловое распределение отраженного сигнала. Это распределение, называемое
Интенсивности отраженного и рассеянного сигналов зависят и от электромагнитных свойств вещества исследуемой поверхности. Если грунт поверхностного слоя планеты достаточно сухой, как, например, на Луне, Марсе и Венере, то его электропроводность относительно невелика. Поэтому характер отражения этим грунтом радиосигнала определяется
Отметим еще, что если бы исследуемая поверхность была идеально ровной, то отраженный сигнал существовал бы в направлении, обратном облучению, лишь когда он распространялся по нормали к поверхности. В случае гладкой поверхности коэффициент отражения радиосигнала (при моно- и бистатической радиолокации) легко определяется, если известна упомянутая выше эффективная диэлектрическая проницаемость грунта. Если же поверхность шероховата, то интенсивность принимаемого сигнала в данном направлении также рассчитывается на основании значения эффективной диэлектрической проницаемости (если учитывать при этом статистические характеристики, касающиеся свойств рельефа поверхности). Конечно, при проведении радиолокационных экспериментов решается обратная задача, и решить ее оказывается гораздо сложнее, а в ряде случаев полученное решение к тому же является и неоднозначным.
Как же решают эту задачу?
Во-первых, из эксперимента определяют диаграмму обратного рассеяния либо при малых углах облучения (моностатическая радиолокация), либо при углах, незначительно отличающихся от угла отражения (бистатическая радиолокация). Далее, учитывая форму диаграммы обратного рассеяния (или диаграммы отражения), подбирают такое значение эффективной диэлектрической проницаемости, чтобы рассчитанная интенсивность принимаемого радиолокатором сигнала соответствовала действительному. Это значение эффективной диэлектрической проницаемости и принимают за исходное.
Лабораторные исследования различных горных пород, проведенные советским ученым В. Д. Кротиковым, а позднее повторенные американцами М. Кемпбеллом и Дж. Ульрихом, показали, что для обезвоженных пород наблюдается однозначная связь между эффективной диэлектрической проницаемостью, определенной на основании радиолокационных измерений на сантиметровых, дециметровых и метровых длинах волн, и плотностью исследуемого грунта. Впоследствии эта зависимость подтвердилась результатами аналогичных исследований с использованием образцов лунного грунта, доставленных на Землю.
Это открытие заставило по-новому взглянуть на возможности радиолокационных измерений — как метода дистанционного определения плотности поверхностного слоя планет. Было проведено сопоставление результатов определения плотности, полученных как с помощью радиофизических измерений, так и другими методами. Эти результаты оказались близкими по своему значению.
И, наконец, обратимся к явлению преломления радиолокационного сигнала. Оно не учитывается при моно- и бистатичеоких радиолокациях. Однако при исследовании условий распространения ультракоротковолновых сигналов выяснилось, что данную компоненту принимаемого радиолокатором сигнала следует учитывать. В частности, его интенсивность вблизи границы раздела двух сред также в основном зависит от эффективной диэлектрической проницаемости.
Измерения высоты полета и скорости движения обычно производятся с помощью радиолокационных высотомеров (рис. 4) и соответствующих датчиков скорости, в основе которых лежит принцип радиолокационного определения смещения частоты за счет эффекта Доплера. Однако эти приборы можно использовать не только по их прямому назначению, но и для исследовательских целей, т. е. для изучения физических характеристик поверхности планеты. Впервые радиовысотомер автоматической станции был использован для исследовательских целей при полете «Луны-9».
 |
Рис. 4. Общий вид радиовысотомера автоматической станции «Луна-16», работающего в режиме приема—передачи
Интенсивность сигнала, поступающего на вход радиовысотомера, зависит от трех групп величин: энергетических характеристик прибора (мощности передатчика, характеристик антенны и т. д.), так называемой геометрии эксперимента (высоты полета, углов наблюдения) и физических характеристик отражающей поверхности. Первые две группы параметров определяются либо путем калибровки, проводимой до эксперимента, либо с помощью телеметрических измерений, осуществляемых в ходе эксперимента. Это позволяет вычислять физические характеристики поверхности по величине интенсивности принимаемого сигнала (т. е. при известных величинах первых двух групп параметров).
По интенсивности сигнала, поступающего при моностатической радиолокации на вход приемника (высотомера), определяется так называемая
Отметим также, что при углах падения Θ ≈ 0° удельная эффективная площадь рассеяния определяется коэффициентом отражения, вычисленном для случая облучения поверхности по нормали к ней. Таким образом, по интенсивности сигнала, поступающего на вход приемника, и по характеру ее изменения (в ходе эксперимента) можно найти коэффициент отражения радиосигнала поверхностью, а также и степень ее шероховатости. Наконец, используя подобный метод измерения, легко определяются эффективная диэлектрическая проницаемость и плотность грунта.
Для бистатических радиолокационных экспериментов главным образом используют искусственные спутники Луны и планет, так как в этом случае могут быть проведены многократные измерения.
Бистатическая радиолокация обычно выполняется но следующей схеме. На борту искусственного спутника располагается передатчик, который генерирует модулированные либо монохроматические сигналы.
Чаще всего этот передатчик является элементом системы передачи телеметрической, телевизионной и другой информации с КА на наземный пункт приема. Прием прямого сигнала и сигнала, отраженного поверхностью планеты, производится на наземном пункте, где устанавливается аппаратура для анализа спектра отраженного сигнала.
Бистатическая радиолокация также может проводиться и с использованием радиоаппаратуры двух космических аппаратов. В экспериментах по бистатической радиолокации часто используются антенны с широкой и круговой диаграммами направленности (рис. 5).
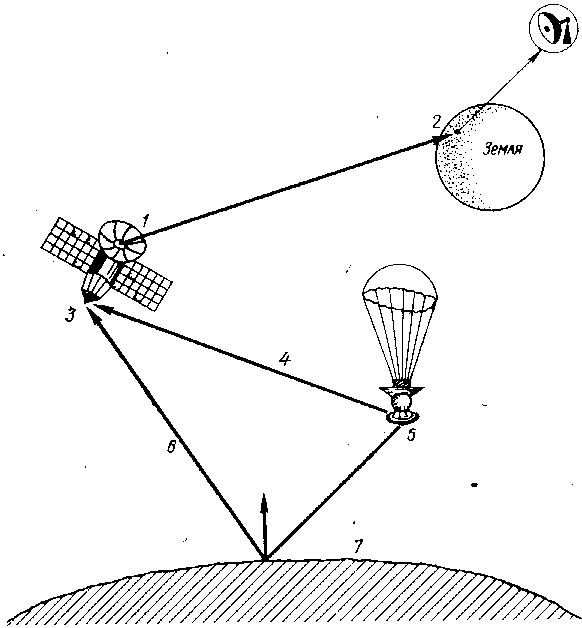 |
Рис. 5. Схема бистатической радиолокации Венеры: 1 — передающая антенна искусственного спутника Венеры; 2 — приемная антенна Центра дальней космической связи; 3 — приемная антенна радиолинии «космический аэростат — искусственный спутник Венеры»; 4 — прямой сигнал; 5 — передающая антенна аэростата; 6 — отраженный сигнал; 7 — поверхность Венеры
Как показали расчеты и экспериментальные измерения в метровом и дециметровом диапазонах, область на поверхности, участвующая в формировании отраженного сигнала, находится вблизи точки зеркального отражения. Эта точка на поверхности определяется из известного условия геометрической оптики — равенства угла отражения углу падения. Причем это условие выполняется не только для гладкой отражающей поверхности, но и для шероховатой, на которой характерные размеры неровностей существенно превышают (больше чем на порядок) используемую длину волны.
Мощность отраженных от поверхности планеты сигналов в основном определяется суммой однократных отражений от отдельных участков поверхности. Однако некоторую роль играют и многократные отражения, особенно в районах со сложным рельефом. При однократном отражении вклад одинаковых по размеру участков поверхности, но находящихся на разном удалении от расчетной точки зеркального отражения, различен. Больший вклад создают участки, расположенные ближе к точке зеркального отражения.
Если поверхность в районе расчетной точки зеркального отражения гладкая, то размеры области, создающей отраженный сигнал, будут определяться интерференцией (наложением) падающей на поверхность и отраженной от нее волн. Применительно к размерам Луны и для высот полета
В случае неровной поверхности размер области, участвующей в формировании отраженного сигнала, существенно возрастает. Проведенные расчеты и выполненные эксперименты по бистатической радиолокации Луны показали, что размеры зоны формирования отраженного сигнала в метровом диапазоне возрастают в 10 и более раз по сравнению с размерами зоны, рассчитанной для гладкой модели поверхности. Для неровной поверхности размер зоны отражения определяется двумя величинами: расстоянием от КА до расчетной точки зеркального отражения и среднеквадратичным углом наклона поверхности, о котором мы уже рассказывали выше.
В результате обработки бистатических радиолокационных экспериментов могут быть получены два параметра: среднеквадратичные углы наклона поверхности и эффективная диэлектрическая проницаемость вещества поверхностного слоя. Первый параметр непосредственно определяется либо из частотного спектра отраженного сигнала при непрерывном излучении, либо из формы отраженного импульса при импульсной модуляции бортового передатчика. Для определения второго параметра обычно требуется измерение энергетического соотношения между прямым и отраженным сигналами. Значение же величины эффективной диэлектрической проницаемости может быть получено только путем сопоставления результатов эксперимента с модельными расчетами, в которые входят определенные значения σα и вариации значений ε для данного пространственного расположения передатчика, планеты и приемника.
Для разделения на наземном пункте прямого и отраженного сигналов используют либо их частотные различия за счет эффекта Доплера, либо временные различия их поступления на вход приемного устройства, так как отраженный сигнал всегда запаздывает относительно прямого. После разделения сигналов производится сопоставление их мощностей и затем уже анализ спектра отраженного сигнала.
Обычно бистатическая радиолокация проводится с помощью бортового передатчика, излучающего немодулированный сигнал, с последующим спектральным анализом отраженного сигнала.
Для повышения разрешения на поверхности в экспериментах по бистатической радиолокации (так же, как и в моностатической радиолокации) используется
В методе с импульсной модуляцией для коротких по длительности импульсов размер зоны отражения на поверхности будет зависеть от длительности импульса и угла падения радиоволн. Так, при длительности импульса в 10 мкс и угле падения Θ = 60° ширина зоны облучения поверхности составит 7,3 км. При сокращении длительности импульса в 10 раз соответственно сократится и зона облучения.
При использовании частотной модуляции (обычно с периодическим линейным изменением частоты во времени) разрешение по дальности (в направлении падения) будет зависеть от диапазона изменения частоты передатчика. Чем в большем диапазоне изменяется частота передатчика, тем больше может быть получено разрешение по дальности.
Использованием модуляции бортового передатчика с одновременным анализом на наземном пункте приема мгновенных спектров отраженных сигналов позволяет осуществить бистатическое радиолокационное картографирование поверхности, которое напоминает частотно-временное картографирование, проводимое при наземных радиолокационных исследованиях Луны и планет. Однако при прочих равных условиях проведение бистатической радиолокации с модулированным сигналом требует наличия передатчика большей мощности, чем при радиолокации с немодулированным сигналом. Поэтому эти виды бистатической радиолокации только начинают находить применение в планетных исследованиях.
| © 2024 Библиотека RealLib.org (support [a t] reallib.org) |