"Удивительная физика" - читать интересную книгу автора (Гулиа Нурбей Владимирович)
Возможен ли двухколесный автомобиль?
Да, автомобиль, именно автомобиль, а не велосипед, мотоцикл, мотороллер, мопед, мокик и пр., где устойчивость достигается «маневрированием» седока, или байкера. Кстати, приходится много читать о том, что устойчивость велосипеда и прочих двухколесных достигается благодаря гироскопическому эффекту их колес. Это явное преувеличение, и вот почему.
Что такое гироскопический эффект? Это возникновение момента при попытке принудительного смещения оси вращающегося тела. Одним словом, то, что мы рассматривали в предыдущем разделе. Но величину гироскопического момента мы не определяли. Для приведенного примера поворачивания велосипедного колеса, например, этот момент равен произведению момента инерции колеса на угловую скорость его вращения и на угловую скорость его поворота («вынужденной прецессии»). Для простоты решим, что масса колеса 2 кг, радиус его 0,25 м и, стало быть, момент инерции, равный произведению массы на квадрат радиуса, равен 0,125 кг⋅м2. Велосипедист спокойно маневрирует уже на скорости 1 м/с, и колесо при этом вращается с угловой скоростью 4 рад/с. Угловая скорость поворота оси колеса раз в 20 меньше и равна примерно 0,2 рад/с. В результате получаем гироскопический момент, равный 0,1 Нхм. Это то же самое, если гирьку в 10 г повесить на линейку длиной в 1 м. Вряд ли такой момент чему-нибудь поможет.
В то же время едущий велосипедист, свернув всего на 10 см от прямой, если сознательно не наклонится в сторону поворота, создаст момент, равный его весу плюс полвеса велосипеда (примерно), умноженные на 0,1 м, или, грубо, 100 Нхм. Это в 1 000 раз больше, чем гироскопический момент! Вот как достигается устойчивость велосипеда.
Но нам нужен не велосипед, а автомобиль, который даже в неподвижном положении сохранял бы равновесие. Прежде всего гарантию от опрокидывания на стоянке дают разве только специальные подставки или, на худой конец, кирпичи, подложенные под борта. Не бывает устойчивости без таких подставок или без постоянного ручного или автоматического регулирования этой устойчивости. Но договоримся, что получать эту устойчивость одним поворотом колес автомобиля мы не можем, так как не сможем создавать своим телом достаточный момент, противодействующий опрокидыванию, как на велосипеде. Представьте себе, что все пассажиры автомобиля во главе с водителем будут то и дело ерзать по сиденьям, спасая автомобиль от опрокидывания. Тут нужен стабилизатор, не зависящий от поворота колес и положения пассажиров.
Вот здесь и смог бы пригодиться гироскопический эффект, о котором шла речь выше. И такой двухколесный автомобиль был создан в 1914 г. русским инженером П. П. Шиловским, а до этого англичанином Бреннаном. Правда, экипаж Бреннана передвигался по рельсу и, строго говоря, был мононорельсовым экипажем, но это сути дела не меняет. Он попроще экипажа Шиловского, с ручным управлением, и понять его принцип действия проще (рис. 64).
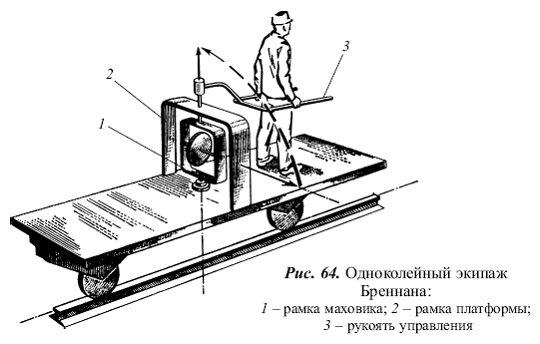 |
При наклоне вагона, допустим, на правый по ходу борт, водитель поворачивал рукоятку 3 влево. Тем самым он, заставляя прецессировать маховик в рамке 1, вызывал гироскопический момент, действующий на жестко закрепленную на платформе рамку 2 и направленный влево по движению. Вагон выправлялся. При этом безразлично, двигался вагон или был неподвижен. Такой вагон, вмещавший 40 человек, был построен для англо-японской выставки в 1912 г. и перевозил посетителей по территории выставки. Надо сказать, что водителем должен был работать мужик здоровый и тяжелый, иначе ему бы не справиться с ролью автомата-регулятора. Да и маховик должен был весить не одну сотню килограммов и крутиться достаточно быстро.
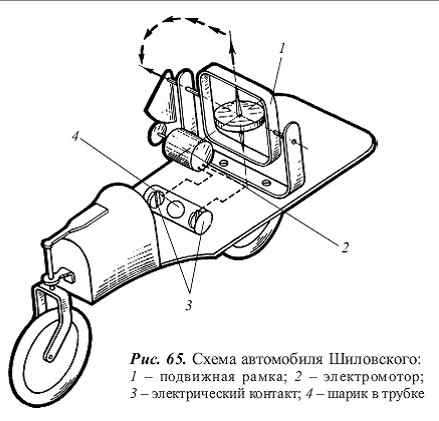
А вот экипаж Шиловского, который появился на улицах Лондона в 1914 г., освобождал человека от подобных неудобств; его схема приведена на рис. 65. Там присутствовала также подвижная рамка 1 с маховиком массой 314 кг, закрепленная на оси в неподвижной рамке, жестко связанной с кузовом автомобиля. Однако роль человека выполнял примитивный автомат, состоящий из трубки с шариком 4, который при наклоне машины перекатывался набок и замыкал соответствующий контакт 3. От этого начинал работать электромотор 2 и через зубчатую передачу вращал рамку 1 с маховиком, совсем как силач-регулировщик у Бреннана.
 |
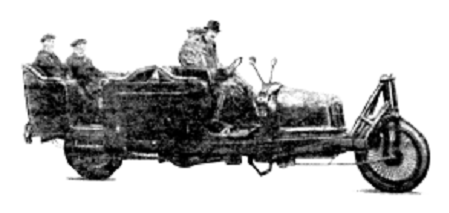
Что можно сказать об автомобиле Шиловского? Для своего времени это было чудо, собиравшее сотни зевак на улицах Лондона (рис. 66). Но задуман он был как военная машина для передвижения по пересеченной местности и для обычного автомобиля был очень дорог. К тому же автоматика заставляла желать лучшего, и на поворотах автомобиль вел себя неадекватно. Но роль свою он сыграл и вошел в историю автотранспорта.
 |
А в 1967 г. появился и был испытан новый американский двухколесный автомобиль «Джирон» с тем же принципом стабилизации кузова. Но все было малогабаритно и современно: маховик диаметром всего 0,6 м, вращающийся с частотой 6 тысяч оборотов в минуту, умещался под капотом машины. Двигатель автомобиля мощностью всего около 60 кВт, поддерживал вращение маховика, и его хватало, чтобы двигать автомобиль со скоростью 140 км/ч. На стоянке и при низкой скорости выдвигались дополнительные колеса-упоры. Этот автомобиль легко ходил по тропам и на косогорах с поперечным уклоном до 60°, сохраняя вертикальность, чего обычный автомобиль, конечно же, сделать не сможет. Такой, по-видимому, была первоначальная задумка Шиловского, но осуществить ее в 1914 г. он не смог.
Имеет ли будущее двухколесный автомобиль? Трудно достаточно уверенно ответить на этот вопрос. Однозначного мнения у автора по этому вопросу нет. Возможно, с развитием автоматики, компьютеризацией автомобилей и потребностью весьма маневренного и экономичного автомобиля, такой и появится снова. Но в одном можно быть уверенным, что маховики появятся на автомобилях прежде всего не как стабилизаторы, а как накопители энергии, способные намного повысить экономичность и динамичность машин. Вот тогда-то почему бы уже имеющийся на автомобиле маховик не использовать еще и как стабилизатор?
| © 2024 Библиотека RealLib.org (support [a t] reallib.org) |